
How to compare specifications of agricultural robots?
'An example with based on eight impactful agriculture robots'
Task - Compare what the Agriculture robot can execute
Is the agriculture robot intended to do weeding, tillage, seeding, spraying.... or all of it, as a 'platform' robot?
Comparing the robotics on its purpose in three 'categories'. Key platform examples are Agrointelli, Elatec en Sitia, offering standard Cat.2 linkage for machinery. EcoRobotix is the key example to targeted on single job: weeding (by targeted herbicide spraying on the weed, no spraying on the crop). All other machines are a in between, offering a platform to connect... however assumed requiring specific tooling or having limitation in construction.

Robustness - The number of successful operational robots
How many machines are already really working in the field? (vertical) And into what extend are components used that are already proven technology, therefore standardised, within the agricultural application? (horizontal)
With more than 100 machines in Europe, the clear 'winner' Naïo compared to the other manufacturers. Those others may have the benefit with using more standardised components, however have not shown it in large numbers on the field.

Crop - Compare the possible crops and fields to work
In which crops can it operate? (vertical) And how many of the field operations that are needed can it perform? (horizontal)
The graph is not showing the potential operations it could do. But what is being performed already. Clearly Agrointelli is appearing the 'best', because of the strategy the manufacturer has chosen: Creating a platform that can operate with existing machines. That's creating the opportunity to serve more crops and operations, compared to the others with less tooling is available 'today'.

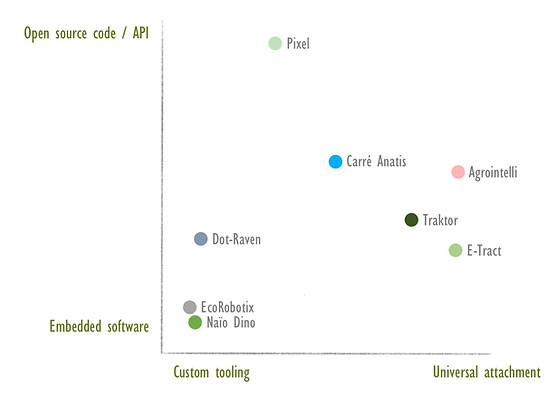
Potential - Possibility to evolve the agriculture robot
And what can the robot do 'tomorrow'? Can external parties develop software? (vertical) And into what extend could manufactures provide universal tooling to attach? (horizontal) Both will contribute to a potential to grow on the functionalities of the machines and on top the way how it can become integrated to the complete farm. On software, the Pixel targets to have exactly the platform to allow experts to further build and integrate with. Agrointelli can on the other hand leverage still existing development for traditional tractors. And Carré is in between these.
Eco-friendly - Sustainability of the agriculture robot
Extremely complex to plot the agrorobotics on an eco-friendly way. While for example EcoRobotix is still using herbicide, with the targeted application it's doing more to reduce it than Agrointelli. Carré and Naïo are the leaders for continuous field maintenance. Pixel has the same ambition, so is expected to move upwards in 2020. For Carré with its Anatis to be places between oil and electric, is due to providing the possibility to run on a generator. Very practical and allowing much longer operation times on a single 'charge' (fuel). Pixel is supported by solar power, but cannot run fully on it. EcoRobotix can, therefore leader.
